2019-07-09 14:04:00
来源:远大防务


四、系统运行
五、采集案例


1.公安应急 + 反恐防爆 + 消防急救 + 预案模拟
| 测试区域 | 门头沟区阳光大厦 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |


| 测试区域 | 天津南翠屏公园 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |

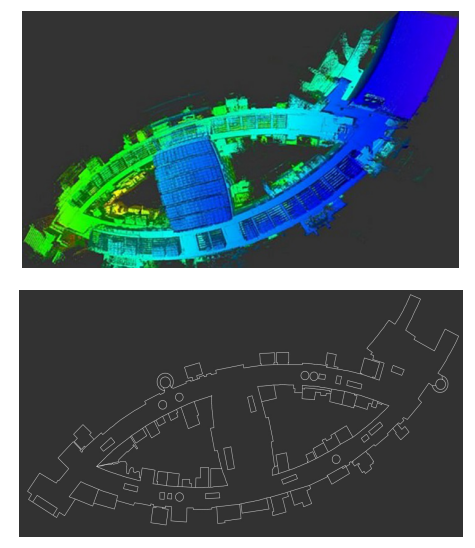
3.室内测图
|
测试区域 |
沈阳市恒隆广场 |
|
配套软件 |
OmniSLAMTM Mapper + AutoCAD |
|
硬件设备 |
SR-DLP6 |
|
总面积:60000平方米 采集时间: 35min 制图时间:40min |
|
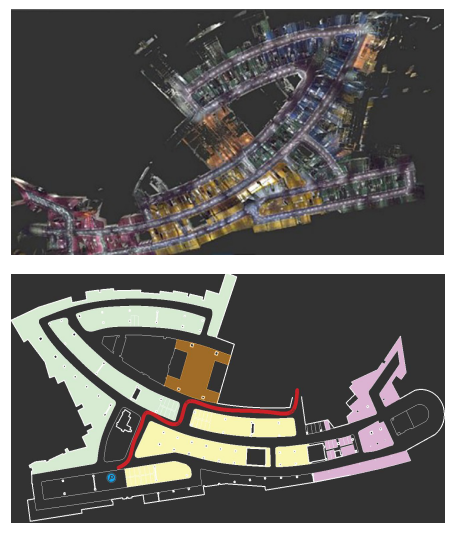
4.室内定位和导航测图
| 测试区域 | 沈阳市恒隆广场底下停车场 |
| 配套软件 | OmniSLAMTM Mapper + AutoCAD |
| 硬件设备 | SR-DLP6 |
| 总面积:15000平方米 采集时间: 15min 制图时间:60min | |
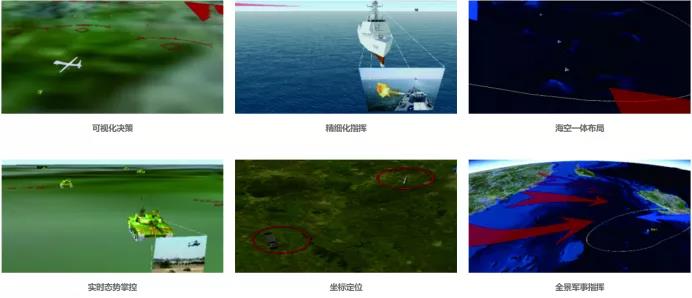
预案作战指挥与训练系统:
系统结合GPS/北斗定位与室内超宽带定位无缝融合,能够实时记录下带有时间戳的单兵移动轨迹,通过跟踪监测军事训练中单兵、战斗分队、车辆物资的活动,来监测作训实施,战术执行、导演导调等情况,分析是否按照计划进行训练,事后对军事训练复盘和参谋作业进行回溯,使得训练效果得到显著的提高。

索取本方案详细资料请留言:http://junqiaowang.mikecrm.com/khxFyK3