2019-11-26 10:28:30
来源:云深处科技

灵敏的仿生步态
仿生足式结构设计,离散式落足, 让&ldquo绝影&rdquo具备快速行走、跑跳、爬坡、上下台阶、 甸甸、摔倒爬起等运动能力。灵敏稳定的仿生步态, 更接近并适应人居和自然环境, 无需改造场地即可到达想去的地点,极大拓展了机器人的可达范围和到达便捷度。
优越的环境适应
&ldquo绝影&rdquo可以兼顾运动的灵活性和稳定性,弥补了传统的轮/履式机器人对复杂路面适应能力的不足,可以在草地、 石子路、砖块路、斜坡、台阶等非结构性地面实现行走式移动,对环境具有更高的适应性。
精准的感知决策
&ldquo绝影&rdquo搭载的智能感知模块,融合了激光、 视觉和惯导等多种传感器,可以快速构建复杂环境的3D地图,完成高精度的定位导航感测并识别设备(物体)的位置和信息,为应用场景各设备单元提供有机连接。
开放的选配能力
标准化二次开发接口,绝影可提供多规格扩展性的开放需求,通过搭载的各类应用模块、智能硬件和其他传感器,为不同的行业场景提供高可用性,安全性和可靠性的应用需要,实现人类与机器人之间的直接合作。
快捷的自主充电
支持自主充电,通过对充电桩的自主识别、对接,自 动完成整个充电过程。自主充电的便捷性,可以让充电运行全过程免人工介入,&ldquo绝影&rdquo 充满电量后便可进入工作状态执行工作任务。

本体四大模块
运动控制模块
支持机器人高速高动态步态规划与平衡控制的算法开发和实现。
环境感知模块
支持大场景高精度地图构建和定位以及导航规划算法开发和实现。
关节驱动模块
支持机器人各类型高速高动态步态和动作的实现。
数据管理模块
支持机器人开发过程中各项数据记录,便于数据分析和故障诊断。
操作方式
绝影拥有极具用户友好度的操作界面,客户可以通过PC端、 手机APPR、摇控手柄对绝影进行操控和使用。
我们可根据您的场景需要,在机器人身上挂载不同的传感器,使其具备图像识别、声波采集、温度采集、气体成分采集等功能。

应用场景
安防巡检
可应用于工厂、园区、变电站、城市地下管廊及其他重场所,通过上述区域的例行检查和定点巡查,获取环境息以及传感设备的识别信息。
物流作业
通过搭载轻量级机械臂,复合型四足机器人可在非结构生产作业环境中实现物料传递、改变障碍物状态以及移式作业。
科研展示
可为各高校/企业实验室提供人工智能领城前沿技术的研平台,并通过科技馆、科创中心、主题展厅等窗口,展示普及机器人技术的先进性、创新性和应用可能性。
勘测探索
可应用于矿产资源、森林资源、地质地貌等野外勘探作业获取环境信息以及传感设备的识别信息,同时,可运输勘探物资。
港口码头
可应用于港口、码头、铁路、隧道及其他重要场所,完成对设备、物资、标识状态及现场环境的查验。
公共救援
可应用于公安、消防等部门,进入人类无法到达的危险环境,例如毒气泄露的化工厂,核泄露的电站,进行环境数据采集和人员搜救。
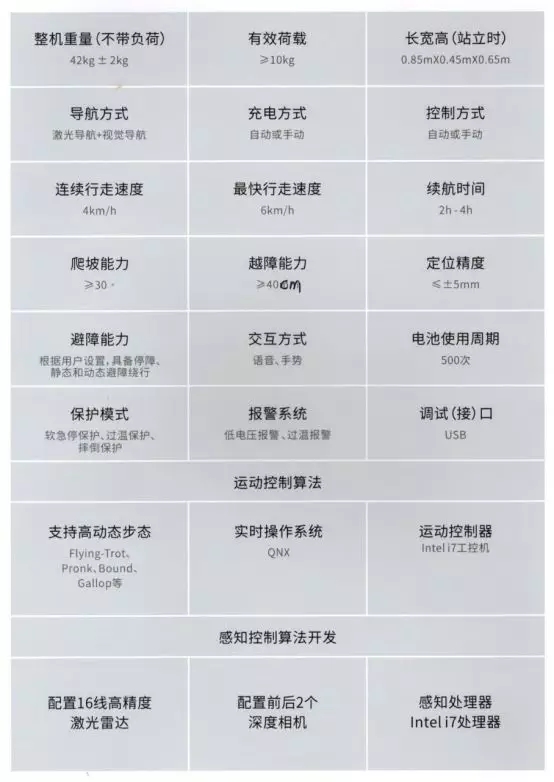
产品参数