2011-06-07 13:33:24
来源:
手持式穿墙探测雷达因为反恐、灾后救援等方面的迫切需要而成为近年来的一个研究重点。常见的墙体多为混凝土结构,频率在1~10GHz范围内的电磁波在穿过混凝土墙壁时衰减很小,其频率与衰减呈反比关系。其中8GHz时的衰减约为lOdB,2GHz时衰减将下降到5dB以下。本系统采用了频谱为09~36GHz两个倍频程的窄脉冲作为雷达发射信号。其相对带宽高达100%,为超宽带信号;绝对带宽27GHz,从而使得系统可能达到0056m 的距离分辨率。同时,冲激式超宽带体制还具有频谱利用率高、保密性好、抗多径性能优异、抗干扰能力强以及结构简单等优点,特别适合手持式穿墙探测雷达的使用。
为了实现穿墙雷达中动目标的精确定位,本文在典型探测环境下对动目标的回波做出准确建模,并结合有效的杂波抑制方法,创新性地将查找表技术引入穿墙雷达应用中,能够迅速有效地获得动目标的位置信息。
系统模型
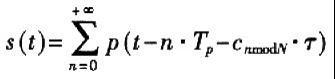
为了增强雷达系统的保密性,提高系统的抗干扰能力,在超宽带信号发射机中,一般多采用PPM调制方式对发射信号的频谱加以改善,然后再直接耦合到发射天线。发射信号可以描述为:
 (1)
(1)
其中p(t)为单个窄脉冲信号,Tp为信号的重复周期,{ci|i=1,2,……N)为伪随机码,NxT为TH-PPM调制时的最大偏移,一般取 ,T为窄脉冲宽度,nmodN表示取余。因为穿墙系统中PPM调制只在信号传输过程中起作用,所以为了方便讨论,这里暂不考虑PPM调制的影响,即T=0。
,T为窄脉冲宽度,nmodN表示取余。因为穿墙系统中PPM调制只在信号传输过程中起作用,所以为了方便讨论,这里暂不考虑PPM调制的影响,即T=0。
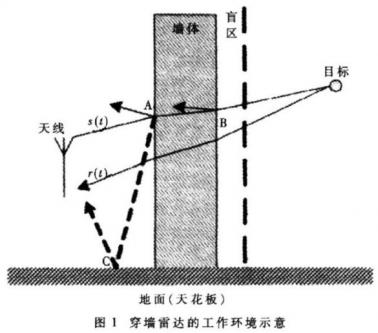
穿墙雷达的应用环境如图l所示,发射信号在A点产生反射、散射和折射,一部分能量直接返回到天线,一部分能量经由地面C点返回,另一部分能量则被传送至B 点,同样经过反射、散射和折射,折射后的能量抵达目标点后,一部分被返回。从图1可以看出,雷达接收到的信号不仅包括墙壁反(散)射回波,还包括地面(天花板)反射回波,这些回波的幅度一般都很大。为了避免接收机饱和,需要消除这些反(散)射渡的影响。常采用的方法是在每个窄脉冲发射后,天线暂时关闭,稍后再转至接收支路,相当于在回波信号上加了一个动态距离门g(t-Tl)。其中天线关闭时间Tl由天线到墙壁的距离以及墙厚、墙介质参数等决定。因为地面反射波到达天线的时间比墙壁反射波的到达时间长,所以Tl的取值一般大于墙壁的反射时间,从而导致墙后一定距离内的回波不能被采集到,产生盲区。
对于收发共用天线,不需要考虑天线之间的耦合效应,同时假设墙体材料均匀,并且对信号的形状不产生影响,则第i个PRT上的雷达回波可以表示为:

式(2)中第一项为动目标的回波;ai为幅度衰减因子,在不同的PRT中变化比较大;v为动目标的径向速度;C为光速,通常v< 可以忽略。第二项为静止目标回波,拥有固定的幅度衰减因子c;n(t)为噪声项。
可以忽略。第二项为静止目标回波,拥有固定的幅度衰减因子c;n(t)为噪声项。
当探测目标的运动速度较低(或者目标做匀速运动)时,超宽带信号的PRF很高,可以取Ⅳ个相邻PRT上回波做脉冲积累,以消除(2)式中噪声项的影响;然后将第i次的累积结果与第i-1次的累积结果相减.再取绝对值,结果为:

将p(1-ξ)和R(t)做相关运算,当相关结果最大时,td=ξ,即为所求的动目标回波延时。变量ξ的下限为Tl,上限为门函数的宽度与Tl之和。为了进一步提高系统实时性,减少运算量,相关处理可以采用二分的方法。
动目标的回波建模和定位
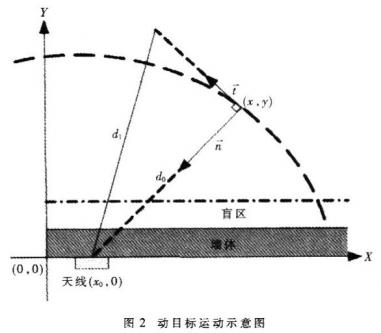
动目标运动示意图如图2,其中t为目标沿雷达扫描的切向运动,n为目标沿法向移动。设起始时间为0,从图2中可以看出,当目标以均匀速度v沿切向运动时:去黑头有效的左旋比较最好推荐很好
d1随时间t的变化呈直线状。根据动目标径向距离的变化即可推知其运动方向。当需要精确的目标方位角信息时,至少需要两根接收天线,然后利用等距弧线之间的交点即可实现对动目标的定位。
为了降低对运算单元的要求,采用了的方式对目标定位。首先根据系统分辨率的要求把成像区域划分成大小为△×△的分辨单元(这里设距离分辨率和方向维分辨率均为△);然后以分辨单元中心为该点坐标,结合墙厚以及墙的介质参数等求出成像区域内各个单元到两根接收天线的延时,形成查找表LUTl和 LUT2。当动目标相对接收天线l的延时为td1、接收天线2的延时为td2时,利用LUTl和LUT2各可以生成一个XY平面上的分辨单元集合
为成像区域中的点坐标,d(xi,yi)为查找表中(xi.yi)点的延时值。两个集合的交集即目标点的准确位置。注意当采用查找表方法时,因为满足条件点不止一个,导致了模糊区域的产生,并且受接收天线之间的距离和目标与天线距离的影响,所以方位相上的分辨率一般较差。

当探测区域内有多个动目标存在时,可结合传统杂波图的方式进行检测。当无法取得杂波图,或者目标运动速度较高时,则系统至少需要三根接收天线,消除上述方法可能产生的虚警。
穿墙雷达的参数和试验环境
试验所用的穿墙雷达的相关参数如下:脉冲信号的重复频率PRF为10MHz,即重复时间PRT等于lOOns;两根接收天线,其中一根做收发两用;数N=64:发射信号为脉冲宽度约500p8的高斯窄脉冲,幅度为3V;盲区宽度为0;动态时间门的宽度为39.8ns,采取等效时间采样方法,采样步进为25ps,所以每个PRT上的采样点数为1592,对应的有效
试验环境:如图2所示,设成像区域的左下角为笛卡尔坐标系的原点(O,0),收发两用天线的位置为(x0,0),其中,x0=lm,0表示天线紧贴墙壁,另外一个接收天线的位置为(x1,0),Xl=1.32m。墙体为普通混凝土,厚约30cm.介电常数εr=4.墙后的成像区域为长6m、宽3m的狭窄甬道,两侧为试验台,摆满了各种电子仪器。
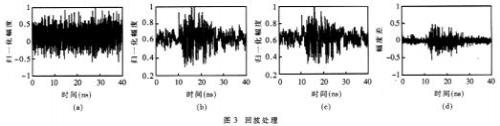
试验中各个环节所得的信号波形如图3所示,图3(a)为单个PRT上的回波波形,图3(b)和图3(c)为64个脉冲积累后的回波波形,图3(d)为图3(c)和图3(a)两个回波的对消结果。可以看出该方法能够比较好地抑制静止杂渡。将图3(d)中的回波与模板做相关处理,即可求得动目标的延时td= 15ns。
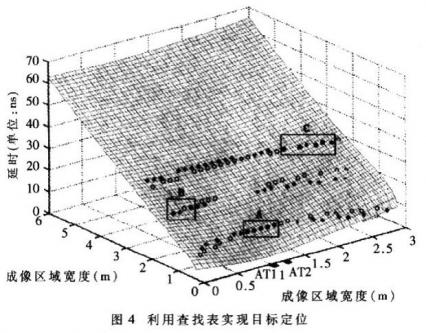
当分辨率设置为lOcm时,根据成像区域生成图4中网格所示查找表。ATl和A12为两根接收天线的位置,A、B、C为从运动过程中摘录的三个点,其中A 点到ATl和AT2的延时相等,B点到AT2的延时比到ATl的多lns,C点到ATl的延时比到AT2延时多1ns。可见利用查找表的结果能够比较准确地确定目标的当前位置。同时从图4中可以看到每个点都包含了几个目标的可能位置,即前面所说的模糊区域。因为探测目标人体本身就占据若干个分辨单元,所以模糊区一般不会影响到穿墙雷达的目标观测。
本文较详细地介绍了穿墙雷达中的动目标检测和定位方法。该方法对系统的计算单元要求很低,图像刷新率快,便于DSP实现,已经在样机试验中取得了良好的效果,未来将在各种非侵入式探测中发挥较大作用。