
2022-04-26 09:50:01
来源:未尔锐创
一、项目背景
现代战争中,无人机已经被越来越广泛地用于执行各种作战任务,在高度信息化的战场环境下,无人机作战模式也出现了转变,由单机自主的作战模式转变为多机协同对目标侦察、攻击的作战模式。在实际作战中,由于无人机飞行载荷有限,能携带的传感器受限,指挥官们需要无人机实现更大范围的平台感知探测,加上战场环境的日益复杂化,作战任务或特定用途的日益多样化,单机作业已无法更好地满足使用方的需求,因此多机协同作业的科技理念应运而生。
采用无人机集群协同探测感知,且配备不同的传感器载荷,以高效的方式实现对地面全局协同探测是一种可行的解决方案。多机形成的规模优势,具有极佳的战场生存能力和任务完成能力,可以用来完成在复杂对抗环境下的协同侦察、协同搜索、协同干扰、协同攻击、对抗等任务。未尔锐创针对这种需求,研发出了“多无人机协同战场环境侦察模拟训练系统”。
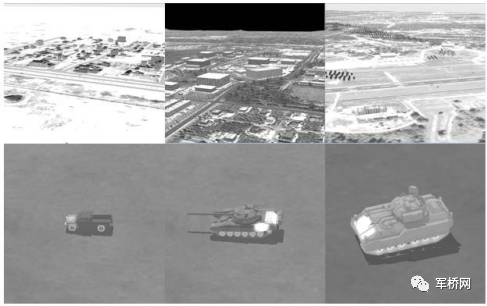
二、无人机对地探测成像图示
(一)单一平台多载荷成像
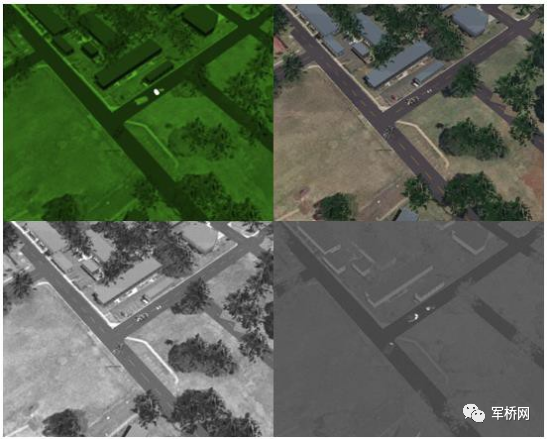
(二)四路平台红外探测成像
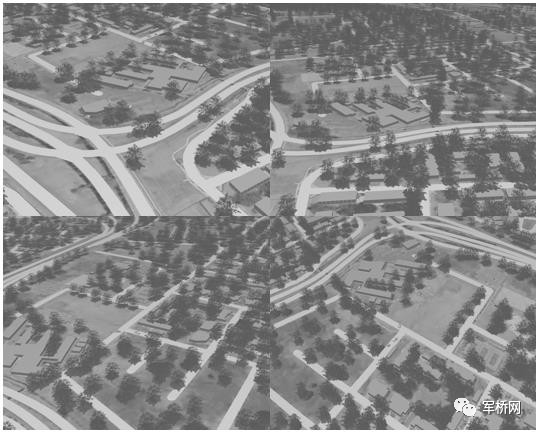
基于未尔锐创自主研发的 VROE SensorXpert 传感器仿真平台设计的“多无人机协同战场环境侦察模拟训练系统”,能够实现多无人机的全方位、全天候、全天时、多波段、多场景和多任务的协同作战仿真与训练。
三、无人机视角与第三人称视角
(一)无人机视角
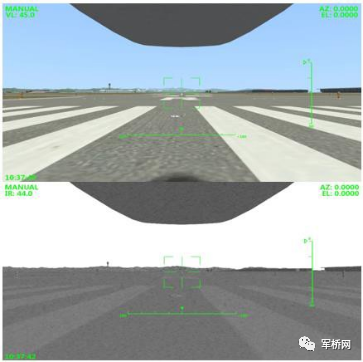
(二)第三人称视角

四、核心功能
对于一个完整的多无人机协同探测地面机动目标的仿真过程来说,主要包括三个步骤:场景想定编辑、探测成像仿真、目标检测识别与目标跟踪。
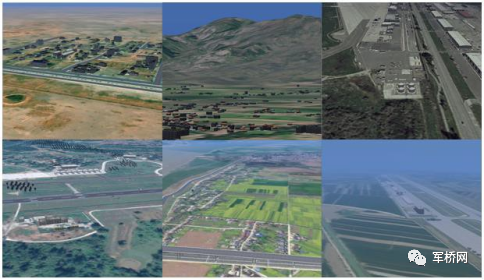
1 .场景想定编辑
利用含材质属性的目标及背景地形三维几何场景,通过人机交互界面或作战想定方案,生成三维战场仿真场景,仿真场景可涵盖多种背景地形、固定目标、移动目标、道路桥梁、机场及油库等重点军事目标。
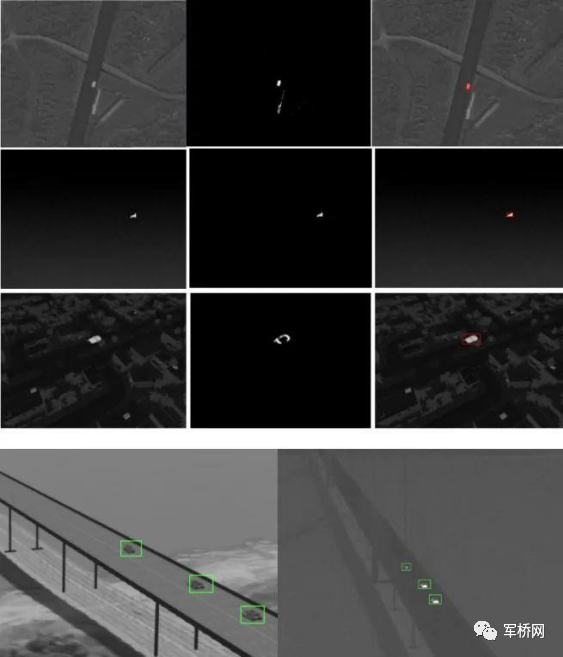
2. 探测成像仿真
仿真系统采用光电一体化全链路成像模型及三维仿真工具软件等,建立包括目标、背景、大气、设备成像等环节的全链路成像参数模型,进行多波段、多方位、多环境下的作战场景及目标的可见光及红外仿真成像。
3 .目标检测识别与跟踪
为了无人机实行打击任务,软件提供经典的目标检测识别等算法(如KCF、SIFT 和 YOLO 等算法),并基于大量的仿真样本数据进行算法训练,从而获取高精度的目标检测识别与跟踪结果。
五、结束语
综上所述,多无人机对地协同探测仿真系统通过仿真建模手段,结合目标检测识别算法,能够完成多无人机多目标识别过程中的多传感器动态调度问题与多无人机对地面机动目标的跟踪。
以实战化思维指导训练,利用模拟仿真、虚拟现实等技术,为战斗力生成注入科技动力。通过“多无人机协同战场环境侦察模拟训练系统”可以使官兵熟练掌握无人机协同作战技巧,快速生产战斗力!



















