
2019-03-26 11:33:43
来源:海鹰资讯
军用地面无人平台是一种用于完成军事任务的自主式、半自主式和人工遥控的机器人,以完成预定战术或战略任务为目标,以智能化信息处理技术和通信技术为核心的智能化武器装备。军用地面无人平台能够代替士兵完成各种极限条件下的特殊危险的军事任务,使得军人在战争中免受伤害。
无人平台是无人作战系统的重要组成部分,可以协助作战人员、或者独立参与作战,可执行侦察、后勤运输甚至火力支援等军事任务,主要从事的任务性质为单调、枯燥、肮脏的工作,并且没有人类士兵的负面情绪的影响。在海湾战争后,大量的无人平台被广泛应用于现代化战场中,担负着越来越重要的角色。图1给出了在伊拉克战场中应用的机器人,包括在战场中被破坏的排爆机器人以及小型抛投无人机。军用地面平台具有较好的隐蔽性、快速机动能力以及较强的战场适应能力,与传统武器可形成战场的不均衡态势,将引发军队组织结构、体制及战术的变化。

一、无人平台技术内涵
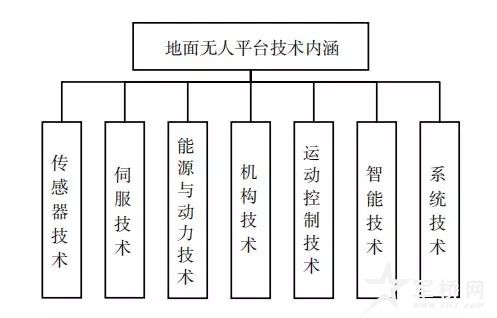
无人平台涉及到多个学科和领域的研究成果,机械、电子、自动控制、计算机、人工智能、脑科学、传感器、通讯及网络等多个学科和领域,按照专业技术体系可归纳出七项主要专业技术,包括:传感器技术、伺服技术、能源与动力技术、机构技术、运动控制技术、智能技术以及系统技术,如图2所示。
1.传感器技术
无人平台传感器可以分为内部传感器和外部传感器两大类。内部传感器用来检测无人平台组成部件的内部状态,一般用于无人平台伺服与稳定控制,包括:位置、角度、角位移、加速度、姿态和航向等。外部传感器主要用于对外部环境的感知,包括:视觉、触觉、力觉、接近觉以及嗅觉、温度等。要使无人平台拥有智能,对环境变化做出反应,首先必须使无人平台具有很强的环境感知能力,用传感器获取外部环境信息是无人平台智能化的必要条件。
2.伺服技术
无人平台伺服系统是无人平台的基本运动单元,主要研究内容包括伺服电机技术、伺服驱动器技术、精密减速器技术、液压泵技术、伺服阀技术、运动控制器技术。按能源输出类型主要包括电动、液压和气动伺服系统。其中,电动伺服系统可分为直接和间接控制两种方式,液压伺服系统也可分直接控制(电静液伺服系统)和间接控制( 阀控液压伺服系统),气动伺服系统可分为冷气式和燃气式。
3.能源与动力技术
能源与动力技术包含为无人平台提供稳定能源和能源管理两个部分,是无人平台运行、工作的基本条件。固定式智能无人平台主要通过电缆提供动力源,移动式智能无人平台大多是通过电池来提供动力源。电池分为化学电池、燃料电池和生物电池等。能源与动力技术涉及化学、电子、物理、材料等多个学科,主要研究高质能比电池技术、燃料电池技术、无污染能源技术、非接触充电技术、电源智能诊断与管理技术。
4.无人平台机构技术
无人平台机构是由各种机械构件和运动副组成的多自由度机械系统,是无人平台实现各种运动和完成各项任务的载体。无人平台机构技术主要研究直角坐标机构、串联机构、并联机构以及各种移动机构和仿生机构的构型综合、运动学和动力学等相关内容。在无人平台所用的机构中,包括轮式、履带式、复合式等行走机构,以及机械臂等执行机构。
5.运动控制技术
运动控制技术是在复杂的情况下,将任务规划制定转变成期望的无人平台机械运动。运动控制的目的是使无人平台实现精确的位置控制、速度控制、加速度控制、力矩和力的控制,以及这些被控制量的综合控制。其主要研究方向包括基于运动学和动力学模型的控制技术、基于传感器的运动控制技术、基于行为的控制技术以及基于仿生机理的运动控制技术。运动控制技术一定程度上影响了无人平台的运动精度与可靠性,进而对无人平台的任务执行效能产生影响。同时,其控制的复杂程度也在一定程度上影响无人平台的硬件需求。
6.智能技术
无人平台的智能体现在能够感知视觉、语音、触觉等各种传感器信息,并对多传感器信息进行融合,并据此进行决策,从而实现各种任务,如自主移动等。无人平台的感知、决策、执行各部分通过特定的控制体系结构有机的结合在一起。因此无人平台智能技术研究的主要内容包括:智能控制体系技术、传感器信息处理技术、多传感器信息融合技术、智能规划技术、自主移动技术等。
7.系统技术
无人平台作为光机电一体化的复杂集成体,涉及众多学科技术领域,特别是在工作过程中面对的环境是未知的、非结构化的。因此,在整个设计验证过程中,仿真成为系统级技术的重要手段;同时,针对无人平台实时操作、状态反馈、环境再现等问题,稳定、友好的人机交互系统成为无人平台不可分离的组成部分;作为信息交互的通信链路,掌握并应用好通信技术发展的最新成果,搭建人与平台、平台与平台之间交流的桥梁是无人平台关键技术之一;将熟知的武器装备在研制生产过程中普遍采用的测试实验方法,系统、有针对性地应用到无人平台技术发展过程中,是保障无人平台技术成功转化为装备,产品的技术保障措施。同时,无人平台作为一种智能化新兴装备在可靠性、安全性等方面的技术标准的研究与制定也需要重点关注。
二、国外军用地面无人平台现状
1.地面无人作战平台
?Gladiator(角斗士)机器人
美国的Gladiator角斗士机器人使用混合动力,有电动机、柴油机和蓄电池。如果需要它悄无声息地行动,可以关闭柴油机,使用蓄电池备用电源,保障完成特殊任务。最大速度为 26km/h,在野外路面上速度约降低 1 倍,能跨越 1m宽的壕沟、70cm深的小河。

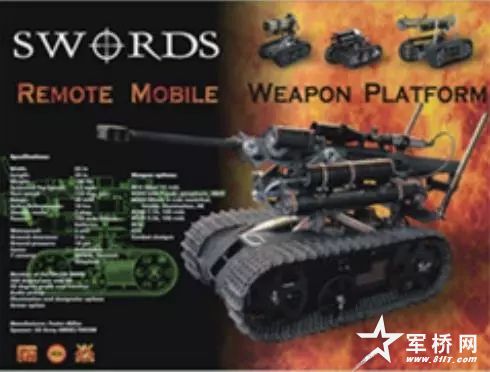
?Sword军用地面无人平台
Sword军用地面平台是以Talon(魔爪)机器人作为底盘,并且加装了武器作战系统,武器系统的光瞄系统主要由4台摄像机、夜视传感器组成,能装备5.56mm口径的M249机枪,或是7.62mm口径的M240机枪,有效控制距离可以达到1km。无人平台以及直流电池为动力源,远程控制终端质量13.6kg,可以同时实现遥控武器站和平台本体控制。
?英国特拉卡尔和黑骑士无人地面车
英国的Trakkar( 特拉卡尔)无人车是全自主式平台,能够承载4名士兵或者250kg载荷,具备创新的跟随能力,能够跟随操作人员通过路面。此外,在美国国防预先研究计划局(DARPA)和英国BAE系统公司的主持下,名为黑骑士的履带式无人车辆由BAE系统公司、卡内基·梅隆大学机器人研究中心等研究机构研究而成,与以往只承受辅助性任务、仍需人类干预遂行任务的无人平台不同,它拥有堪比有人战车的自重、20mm速射火力系统、全地形通过能力、全频谱感知器组、完善的战术数据链以及先进的人工智能指挥系统。

?俄罗斯平台-M机器人
平台-M(Platforma-M)是一种最新式机器人作战系统,其设计目的是与敌人进行非接触性战斗。按照设计构想,该系统为多用途作战单元,既能充当侦察兵,也能巡逻并保护重要设施。凭借其武器装备可用于火力支援。其武器制导系统可自动运行,无需人工操作。平台-M虽然体型很小,但威力强大,装有榴弹发射器和机枪系统。

?俄罗斯狼-2移动机器人
狼-2(Volk-2)质量高达1t( 平台-M只有800kg),作战任务依然为与敌人非接触战斗为目标。狼-2采用履带式底盘进行机动,具有较强的野外通过能力,可实现较为高速的野外机动能力;不配备乘员,在5km内通过无线电频道控制,测试中完美地克服了春天的泥泞路面。狼-2装备有卡拉什尼科夫机关枪、峭壁(Utes)和绞线(Kord)重机枪,可在35km/h的时速下开火。狼-2具有防护装甲,同时利用包含热成像仪、激光测距的光瞄系统实现对战场态势的侦察与跟踪,遥控武器站实现打击。

2.多用途移动平台
●Crusher(破碎者)无人车
破碎者无人车是由DARPA投资,卡内基·梅隆大学机器人研究中心设计研制,计划装备陆军的新一代无人武装侦察车。该车具有无人操控、能够运载任何货物、防范敌人攻击并轻而易举地高速通过使悍马车也会翻车的地形等特点。该车除了拥有无人驾驶技术以外,还装备了美军开发的用于无人车辆的混合动力发动机和先进的悬架系统,能够携载质量1800kg的负载,爬越1m高的垂直台阶。破碎机的设计时速为40km/h,当操作人员输入目的地信息后,能够以完全自主控制的方式行走约450km。

●SMSS(公牛)无人车
SMSS是班组支援无人平台,由洛克希德马丁公司研制,可实现半自主控制以及遥控控制,采用六轮独立驱动,具有全地形的适应能力,主要实现伴随运输功能,同时可搭载相应的态势感知以及打击载荷实现侦察、火力支援等任务。

●MULE(骡子)多用途无人平台
MULE是通用型无人平台的典型产品,主要采用摇臂式主动悬挂方式,轮毂电机驱动,可翻越1.5m的障碍,野外通过性能得到保障;同时越壕宽度可达到 1.5m以上,纵坡以及横坡的通过能力均可达到 40o以上,具有一定的涉水能力。同时可搭载ANS自动导航系统以及运输组件,实现自主以及半自主的运输、作战支援等任务,混合动力方式在保障其隐蔽性的同时满足长时间使用的要求。

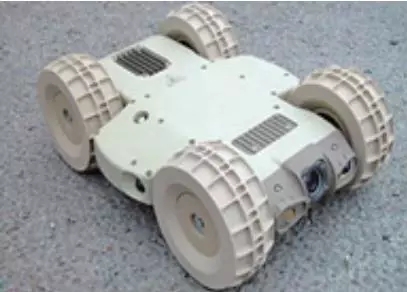
●以色列的卫士无人平台
卫士是一款具有高度自主能力的多用途无人平台,由以色列G-NUS公司研制,有三代主要产品:MK-1、MK-2、MK-3。前两代主要为半自主运动模式,可实现自主避障;第三代无人平台可识别障碍物,可实现局部的路径规划实现障碍的自主绕行策略。以列色将该型平台部署于边境区域以及机场,通过搭载不同的载荷,可分为运输、侦察、引导以及作战四种用途。

3.单兵无人平台
◆PackBot机器人系统
该型机器人自重较小,适于单兵携带,利用OCU进行远程遥控完成侦察、排爆等作业,质量18kg,最大速度3.7m/s,涉水可达3m,每次充电行驶距离13km。通过模块化机械与电气接口,可以扩展为侦察机器人、排爆机器人以及小型作战机器人,性能稳定、用途广泛。2008 年PackBot机器人全球销售突破 2000 台。

◆Talon(魔爪)军用地面无人平台
美国的魔爪军用地面无人平台目前被大量部署到阿富汗和伊拉克等地区,首要任务是辅助军事人员完成一些极端危险的工作,如侦察和拆除敌方部队为攻击已方部队而设置的路边炸弹及一些简易爆炸装置(IED),有效降低人员处置危险物品的风险。魔爪能够在不装备爆炸物处理装置(EOD)和战斗工程设备的情况下遥控拆除简易爆炸装置,载荷为45kg,可翻越最高43o的台阶、45o的斜面、38cm深的雪地及拆迁废墟。

◆SandFlea沙蚤机器人系统
DARPA联合波士顿动力公司研制出一种新型的小型无人地面车,被称为“ 沙蚤”,它是一种跳跃式机器人,呈鞋盒状,质量约4.5kg,通常采用4轮行驶,但也能垂直跳跃,高度达9m,能独立越过壕沟和障碍,其跳跃能力是凭借一个集成的、向下喷火的助推装置并附着填充CO2的药筒,一次装药可使该车进行20~30 次跳跃。

◆Dragon runner龙行者机器人
Dragon runner由美国海军陆战队战斗实验室、海军研发办公室会同卡耐基·梅隆大学机器人研究中心合作研制,核心装置是一个无线调制解调器和UHF图像传输系统。龙行者体积很小(0.394m×0.28m×0.13m),质量轻(7.45kg),但机动性强,样机的速度达到8.9m/s。龙行者的用途是在城市街巷代替士兵开展侦察,协助实施精确打击,减少伤亡。
4.仿生无人平台
?Bigdog(大狗)仿生机器人
由于履带式和轮式机器人不能真正到达所要保障的士兵可能要去的每一个地方,美国国防部联合MIT和波士顿动力公司等研制的Bigdog高70cm,重约75kg,采用汽油动力,最高负载量为120磅,速度为3.3miles/h,1.5m/s内装维持机身平衡的回转仪,由本身的立体视觉系统或远程遥控器确认路径,主要用来运送军用物质。

?Petman以及Atlas机器人战士系统
Petman是波士顿动力公司开发的一款仿人机器人,其拥有人类的身高,像人一样行走,最高步速达到约2m/s,可实现跳跃、下蹲促膝和俯卧撑等行为。PetMan能够保持自身平衡,保持稳定的行走状态,初始研制目标为暴露在化学武器或者放射性环境下,代替人类士兵完成指定动作,实现防化服测试过程中的信息采集与评价。
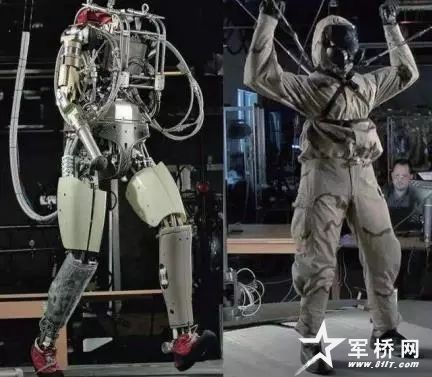
Atlas为波士顿动力开发的另一款较为典型的仿人机器人,其采用便携式液压泵站进行能源供给,同时具有28个液压伺服关节实现各关节自由度,可采用遥控以及半自主运动方式。最新发布的资料中显示,该型机器人具备在丛林、草地等非结构地面条件下的通过性。该型机器人具有与人类接近的构型与自由度配置,可以实现替代人类在狭窄环境、城市巷战等环境下执行多种作战、支援等任务,同时可以使用与驾驶人类的工具与载具。

三、国内军用地面无人平台现状
我国的无人作战体系主要集中于无人作战平台的研究,并且这些研究还处于原理样机阶段,鲜有产品能够真正投入大规模研制和应用。我国无人作战体系还没有较为完整的规划,对其研究主要集中在高校等一些专门研究单位,体系创新和集成能力差,很难具有综合完成无人体系的研发能力,距达到体系间的协同技术水平也有很大的差距。
▼锐爪系列无人平台
锐爪1型无人平台,采用履带式行走机构,自重120kg,可用对敌人目标侦察、打击,对已隐藏于建筑物、坑道内的恐怖分子进行搜索打击,对于受困人员实施援救等任务。该平台可以自主安全驾驶、完成多通道的通讯及远距离遥控武器射击,具备多种侦察手段。

▼班组任务支援平台
班组任务支援平台是一款无人驾驶的轻型全地形车,该车总体结构采用 6×6 无悬架全地形车身,增程式混合动力驱动,大数据量的路径规划处理计算机。该产品主要作战用途包括:搭载班组人员及装备执行前线搜索、巡逻、战斗等任务;运输弹药、医疗用品等军用物资;战场救护和自主边境巡逻等。

▼多用途小型无人平台
中国航天科工飞航技术研究院研制的500kg级别多用途小型无人平台采用轮毂电机的驱动方案,实现6轮行走机构模块化设计,构型为六轮独立悬挂与四轮独立转向方式,在非结构化环境中具有良好的机动性能与通过性能,最高行驶速度达到30km/h。该型平台具有较小的体积与较高的承载能力,可搭配大型液压机械臂( 末端负载70kg以上)、遥控武器站等上装载荷,采用远程遥控方式,可在城市环境以及野外环境中执行打击、救援、危险物排除等任务。

四、军用地面无人平台发展趋势
根据实战化需求,美军制定了详细的近期、中远期规划,重点在降低士兵的体能以及感知方向的能力需求,同时在通用化、模块化方面给出持续发展规划。在分析美军的发展规划基础上,结合其他先进平台的技术发展路径,给出军用地面无人平台的发展趋势。
(1)更加强调一体化作战支援能力。未来战场更加强调联合作战能力,其基于信息化技术的发展,动态化与不可预测的特性更加明显,因此需要地面无人平台具有一体化的作战支援能力,既可实现快速运输、伴随保障、通信中继等后勤保障任务,也可实现快速精确打击、情报侦察等作战任务。这就要求重点提升地面无人平台态势感知、作战应用、多机协同、自主控制、战场防护以及战场机动等六个方面的能力。伴随着人工智能、传感器信息感知以及通信技术的发展,军用地面无人平台逐渐由执行远程遥控、排爆、侦察等特定任务发展到执行班组跟随、前导侦察等半自主复合型任务功能。
(2)重点提升自主性能,加强态势感知能力。除了大小与功能外,反映地面无人平台的主要特性为其自主水平,从100%的远程遥控控制,到部分功能自主直至全自主。现阶段主要是以远程遥控为主,存在两个方面的问题:一方面是需要操作人员时刻关注平台与周边环境状态,操作人员的负担较重;另一方面,远程遥控对于通信的带宽以及实时性具有较高的要求,同时对通信的安全性与稳定性要求也较高。半自主以及全自主地面无人平台通过内部以及外部传感器实现对环境以及自身状态感知,借助决策系统将任务分解至规划层与控制层,实现地面无人平台的自主行为与路径规划,实现在非结构环境下的障碍物检测、感知以及规避功能。
(3)提升地面无人平台的互操作性。互操作性是制约地面无人平台走向实战的关键技术,需要重点解决多个平台以及系统之间的信息共享能力,互操作性的提升有助于降低对地面无人平台的后勤保障需求以及总体部署经费需求。提升系统的互操作性需要重点解决接口、数据类型与格式、通信频带与设备的标准化问题,采用开放式体系架构,在各层次架构基础上采用公开的标准化接口。美军正在制定无人平台与有人平台的接口标准,基于与北约标准化协议相兼容的标准,提出一系列针对地面无人系统的互操作性发展原则,以期能够协调各平台之间的发展,使各类新型无人平台能够快速融入无人作战系统,有效简化系统测试以及集成流程。
随着战争形态的变化以及无人化战场的需求,军用地面无人平台大规模进入战场已经成为一种必然趋势。通过分析发现,在无人平台的研制与运用方面,我国与先进国家仍然存在一定差距。因此,建议从顶层进行规划设计,充分论证地面无人平台发展路线图,梳理关键技术体系;同时,加强关键产业链建设,确保关键元器件、外协配套体系持续完善,并且加强原创性无人平台设计能力。



















